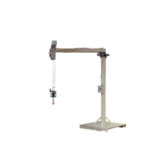
悬挂式助力机械手
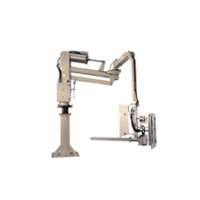 | 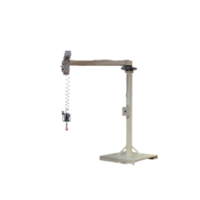 |  |  |
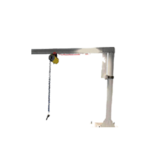
| 硬臂式助力机械手 | 软索式助力机械手 | 折臂吊 | 电动平衡吊 |
 |  |  | |
| 气动平衡吊 | 悬臂吊 | 墙壁吊 |
|
此产品特别为困难搬运设计和制造,满足任意方向移动沉重且不规则负载的要求, 使操作人员在符合人体工学和安全环境以最小负荷工作。它以其灵活且稳固的结构消除漂移的影响。 |
最大负载. 900 Kg
最大工作半径: 4500 mm
垂直升降: 0,5 米/秒
控制系统: 2200 mm
控制系统: 全气动
供应: 过滤压缩空气(40 µm),不含油脂
工作气压: 0.7 ÷ 0.8 Mpa
工作温度: 从 +0° a +45° C
噪声强度: 耗气量: 每个工作循环 100 Nl ÷ 400 N
旋转: 立柱轴和夹具轴360°持续旋转中间轴300°持续旋转
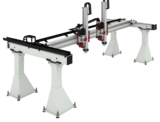
1.固定式安装(硬臂立柱式助力机械手) 主要适用于重心远离悬臂挂点,或者是工件需要翻转,倾斜的工况; 2.悬挂式安装(倒挂式助力机械手) 主要配合铝合金导轨,可实现大面积矩形范围的覆盖。 3.移动式安装(移动式助力机械手) 主要适用于移动式作业,一般安装在移动小车上。灵活移动,适应范围广。
|
1.具有全程悬浮功能,操作轻松自如; 2.根据人体工程学原理制造,操作舒适方便; 3.结构设计模块化,气路控制集成化; 4.人力成本减少50%,劳动强度下降85%,生产效率提高50%; 5.根据产品负载,操作行程量身定制,形式多样,满足不同需求。 |
1.断气保护装置,防止起源断气后,设备不坠落,确保完成当前工序; 2.工作压力显示,显示工作压力状况,降低设备操作风险; 3.刹车安全装置,避免设备由外力产生的转动,确保安全操作; 4.全程平衡单元,实现无重力化操作,提供设备动作精度。 |
上/下控制杆
它确保了在无需任何调整下,只需简单驱动一个控制杆,就可对负载进行快速、精确和流畅地提升和搬运。
按钮杆
它确保了负载提取后通过操作控制杆驱动一个气动按钮来实现负载平衡。
生产流程 |
|---|
 |
|---|
打包发货 |
|---|
|
|---|